 Tiếng việt
Tiếng việt English
English français
français Deutsch
Deutsch русский
русский español
español português
português العربية
العربية 日本語
日本語 한국의
한국의


gọi cho chúng tôi ngay
ĐT: +86-4000988557;
ID Skype: gfreex@hotmail.com;
WeChat: Troysupply_com;
ID QQ: 8936906

an industrial robot is a multi-joint manipulator or a multi-degree-of-freedom machine device oriented to the industrial field. it can automatically perform work and is a machine that relies on its own power and control capabilities to achieve various functions. it can be commanded by humans, and it can also be run in accordance with pre-arranged programs. modern industrial robots can also perform tasks in accordance with principles and guidelines established by artificial intelligence technology.

The first industrial robot conforming to the ISO standard was produced by bill griffith taylor in 1937 and published in meccano magazine in march 1938. This crane-like industrial robot is made of meccano parts and powered by a single electric motor. This industrial robot can stack wooden blocks in a pre-programmed way.


▲ george Davor
robotics is a multidisciplinary field that combines the fields of mechanics, electronics, computer science, control, artificial intelligence, physics and mathematics. industrial robots are composed of six basic components: dynamic units, end-of-arm machines, digital computer controllers, actuators, input devices and detectors.

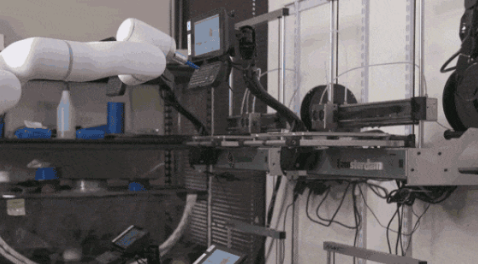

▲ abb industrial robot completed the "Fanta Tank" challenge
articulated configuration: The articulated arm is the most common robot arm, very similar to a human arm. usually six-axis machines, they provide redundancy and move smoother.
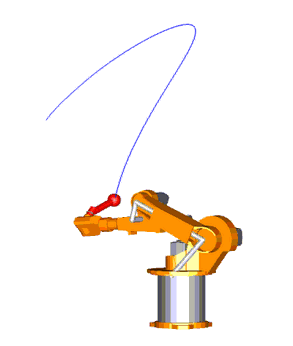
▲ articulated joint configuration

▲ SCARA configuration joint configuration
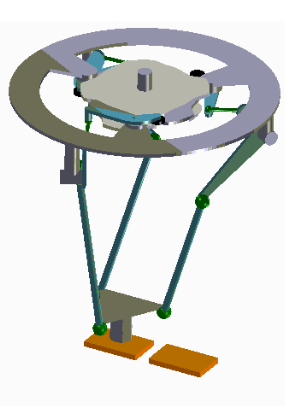
▲ parallel industrial robot
a parallel mechanism can be defined as a closed-loop mechanism in which the moving platform and the fixed platform are connected by at least two independent kinematic chains, the mechanism has two or more degrees of freedom, and is driven in parallel.
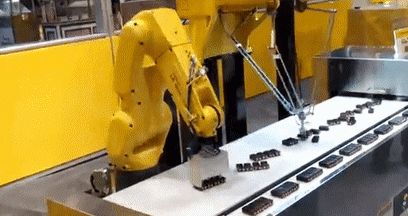
typical applications of industrial robots include welding, painting, assembly, collection and placement (such as packaging, palletizing and SMT), product inspection and testing, etc.; all tasks are completed with high efficiency, durability, speed and accuracy.
in order to perform work tasks more accurately, industrial robots usually include machine vision subsystems as their vision sensors, connected to powerful computers or controllers. For modern industrial robots, artificial intelligence robotshave become increasingly important equipment.

ĐT: +86-4000988557;
ID Skype: gfreex@hotmail.com;
WeChat: Troysupply_com;
ID QQ: 8936906




















xin vui lòng đọc tiếp, ở lại đăng, đăng ký, và chúng tôi hoan nghênh bạn cho chúng tôi biết những gì bạn nghĩ.
 IPv6 mạng được hỗ trợ 粤ICP备2021036697号
IPv6 mạng được hỗ trợ 粤ICP备2021036697号 Dịch vụ trực tuyến
Dịch vụ trực tuyến 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com Richard Liu
Richard Liu TROY
TROY 8936906
8936906 Troysupply_com
Troysupply_com